Download præsentationen
Præsentation er lastning. Vent venligst

1
- a giant leap for mankind?
Rumfart - a giant leap for mankind? Karl Kaas Laursen, civilingeniør, phd. Kresten K. Sørensen, civilingeniør

2
Hvad er rumfart? Raketter Astronauter Satellitter Stjernekrig
Rumstationer Rumfærger Deep space Videnskab Krig Business

3
De gamle dage Fyrværkeri i 1300-tallets Kina
Raketter over København 1807 Flydende brændstof 1909

4
2. Verdenskrig Tysk dominans Dræberraketten V-2 Werner Von Braun

5
Den Kolde Krig Vesten samles i USA
Interkontinentale Ballistiske Missiler (ICBM) Affyring fra ubåde eller land Rækkevidde: Anywhere!
 Affyring fra ubåde eller land. Rækkevidde: Anywhere!")
6
Rumkapløbet Missil eller rumraket? Fra “sub-orbital” Til “orbital”

7
Sputnik og Laika Sovjet kom først “derud” i 1957

8
Første mand i rummet 12. april 1961: Yuri Gagarin, Sovjet

9
Mercury 1958-1963 Første amerikanske bemandede rumprogram
Formål: Ud at tage en kigger

10
Gemini 1965-1966 USA mener det seriøst
Der trænes i dokning og månelanding

11
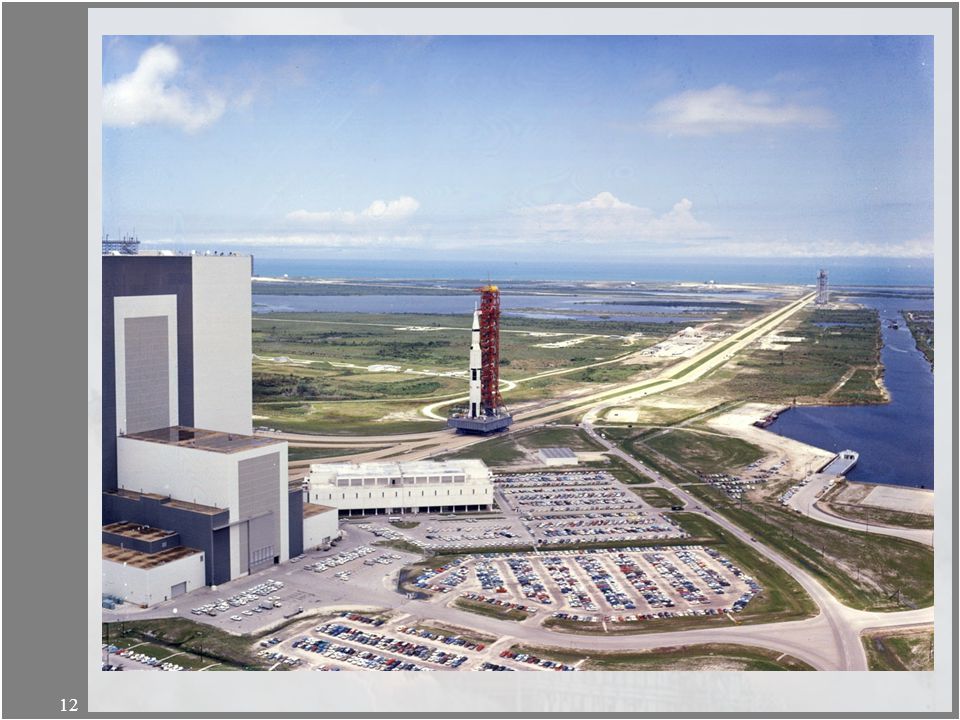
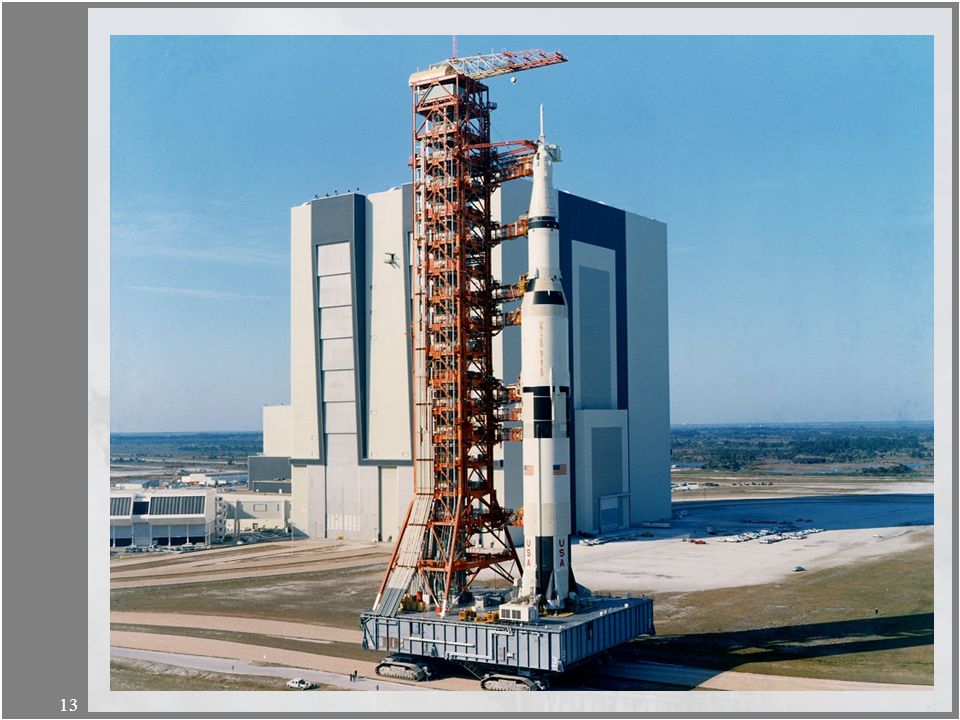
Apollo - månen tur/retur

16
Sovjet prøver også: N-1

17
Sovjet prøver også: N-1

18
Rumfærgen 2. generation rumfart Genbrugelige dele Uhyre kraftig raket
Alsidigt fartøj Åbnede muligheder Men enormt dyr!

19
Rumlaboratorier International Space Station (ISS) Skylab Mir
 Skylab Mir")
20
Videnskaben Jordobservation Vejrudsigten kommer fra rummet
Klimaændringer Katastrofeforudsigelse Spionage

21
Videnskaben Rum-observation Præcise positionsmålinger af planeter
Udforskning af universets dyb (Hubble) Store spørgsmål: Universets alder Livets oprindelse Relativitets teori
 Store spørgsmål: Universets alder Livets oprindelse. Relativitets teori.")
22
Business Kommunikation Satellit-tv Telefoni Internet

23
Militær Spionage Affyringsramper i rummet GPS
Stjernekrigsprojektet - Rum-LASER Kommunikation

24
Ud i solsystemet AURORA – ESA space exploration programme

25
Ud i solsystemet AURORA - månebase

26
Dansk rumfart Ørsted satellitten Måling af magnetfeltet 2 års mission
Virker endnu efter 6 år

27
Ungdommen rykker ind CubeSats 10cmx10cmx10cm 1,0 kg AAU CubeSat
DTU-Sat 10cmx10cmx10cm 1,0 kg

28
AAU CubeSat (2001-2003) Formål: Uddanne ingeniører
Mission: Tage billeder af Jorden

29
Pause

30
AAUSAT-II (2003-2006) Formål: Uddanne flere ingeniører
Mission: Måle stråling i rummet

31
Krav Masse maks. 1 kg Størrelse 10x10x10 cm
Temperatursvingninger mellem -40 og +80 grader Celsius Stød og vibrationer under launch Elektromagnetisk stråling fra solen og rummet

32
Blokdiagram

33
MECH Satellitstrukturen designes og fremstilles af MECH
Der designes med henblik på kravene til masse, vibrationer og temperatur.

34
Electrical Power System
EPS er satellittens strømforsyning og skal: Konvertere strøm fra solcellerne til en reguleret spænding Lade på batteriet der bruges som backup når satellitten er i skygge af jorden eller bruge mere strøm end solcellerne kan levere Fordele strøm til de andre subsystemer EPS er det første subsystem der tændes og er ansvarlig for opstart af resten af satellitten EPS skal lukke ned for unødvendige subsystemer hvis batterispændingen bliver for lav.

35
On Board Computer OBC er satellittens hovedcomputer hvorpå styresystemet og andre processorintensive opgaver kører Baseret på en 32 bit RISC 40MHz 2 MB SRAM 4 MB data FLASH 4 MB program FLASH

36
Command and Data Handling
CDH er styresoftwaren til satellitten Skal gemme kommandoer fra jorden i en flight plan og udføre dem til den planlagte tid Skal indsamle housekeeping data fra de andre subsystemer

37
Payload P/L er satellittens videnskabelige payload med en gammastråle detektor udviklet af Danish National Space Center Systemet skal detektere og måle gammabursts fra solen og det ydre rum Data skal opsamles i RAM og sendes til CDH Detektoren er en CdZnTe (Cadmium Zink Tellurium) krystal der giver et svagt signal der kræver en meget støjsvag forstærkning
 krystal der giver et svagt signal der kræver en meget støjsvag forstærkning.")
38
ADCS ADCS (Attitude Determination and Control System) skal:
Detumble og stabilisere satellitten efter launch Kontrollere attituden af satellitten igennem længere tid Udføre eksperimenter med attitude kontrol for små satellitter Teste forskellige kontrolalgoritmer Teste forskellige determinationsalgoritmer

39
Modellering For at gøre det muligt at finde og kontrollere satellittens attitude skal der udvikles en matematisk model af det miljø den befinder sig i. Kun de væsentligste påvirkninger skal inddrages i modellen: Massetiltrækning Solvind Atmosfærisk friktion Jordens magnetfelt

40
Attitude Determination
Attitude determinationen skal ud fra informationer fra solsensorer, magnetometre og modellen afgøre hvor satellitten befinder sig og hvordan den vender i forhold til jorden Attitude kontrollen er baseret på disse oplysninger og derfor skal estimatet af attituden være så præcist som muligt Det er processorkrævende at udregne et attitude estimat og derfor lægges denne opgave på OBC’en

41
Attitude kontrol Kontrollen udføres vha. momenthjul og magnetorquers
Magnetorquers giver 2 akse kontrol på kort sigt og 3 akse kontrol på lang sigt (over et helt orbit) Momenthjul giver 3 aksekontrol på kort sigt men kan gå i mætning Momenthjul kan unloades med magnetorquers
 Momenthjul giver 3 aksekontrol på kort sigt men kan gå i mætning. Momenthjul kan unloades med magnetorquers.")
42
COM COM systemet er satellittens forbindelsesled til jorden
Indeholder en radio, et modem og en microcontroller Omdanner digitale data til et analogt signal der kan transmitteres via radio Der skal udvikles en protokol til overførsel af data mellem satellitten og jorden

43
AAUSAT-II Engineering Model
Tro kopi af Flight Model

44
AAUSAT-II Engineering Model
Tro kopi af Flight Model Test Fejlfinding Udvikling

45
AAUSAT-II Vakuum-test simulerer det ydre rum

46
AAUSAT-III Prototyper
Udvikling af kamera til AAUSAT-III

47
GND GND er jordstationen der skal modtage og afkode data fra satellitten. Signalet fra satellitten er meget svagt og derfor skal der bruges store antenner og en følsom radio Flight plan og kommandoer uploades til satellitten fra jordstationen

48
Mission Control Center
MCC er bruger interface til satellitten og giver mulighed for: Flight planning Direkte kontrol Få informationer om batterispænding og temperatur MCC styrer GND og bestemmer hvilken satellit der skal kommunikeres med

49
Launch 1/2 Satellitten sidder i en P-pod på raketten under opsendelsen
Satellitten skydes ud af P-pod’en med en fjeder og vil sandsynligvis rotere langsomt (tumble) Tumbling vanskeliggør kommunikation med jorden Satellitten indsættes i et Low Earth Orbit i ca. 700 km højde Satellittens hastighed er ca. 7 km/s
 Tumbling vanskeliggør kommunikation med jorden. Satellitten indsættes i et Low Earth Orbit i ca. 700 km højde. Satellittens hastighed er ca. 7 km/s.")
50
Launch 2/2 Efter frigørelse fra raketten aktiveres strømforsyningen i satellitten EPS venter et stykke tid inden antennen udfoldes og OBC startes Når OBC er startet tænder den for ADCS der begynder at detumble satellitten Når satellitten er detumblet kan almindelig operation begynde

51
Status for projektet Hardware for subsystemerne er på prototypestadiet
Vi er i starten af integrationsfasen hvor subsystemerne skal testes op mod OBC Derefter skal der laves en engineering model der testes meget grundigt Når engineering modellen virker fremstilles en flight model, som er selve satellitten der skal sendes i rummet

52
Vægtløshed ESA Student Parabolic Flight Campaign

53
Vægtløshed

54
Vægtløshed Betyder IKKE “mangel af tyngdekraft”
Men: “Der er ingen kraft, der forhindrer én i at falde” Man kan ikke “mærke” tyngdekraft hvis ikke der er en modvirkende kraft.

55
SSETI Express Student Space Exploration and Technology Initiative

56
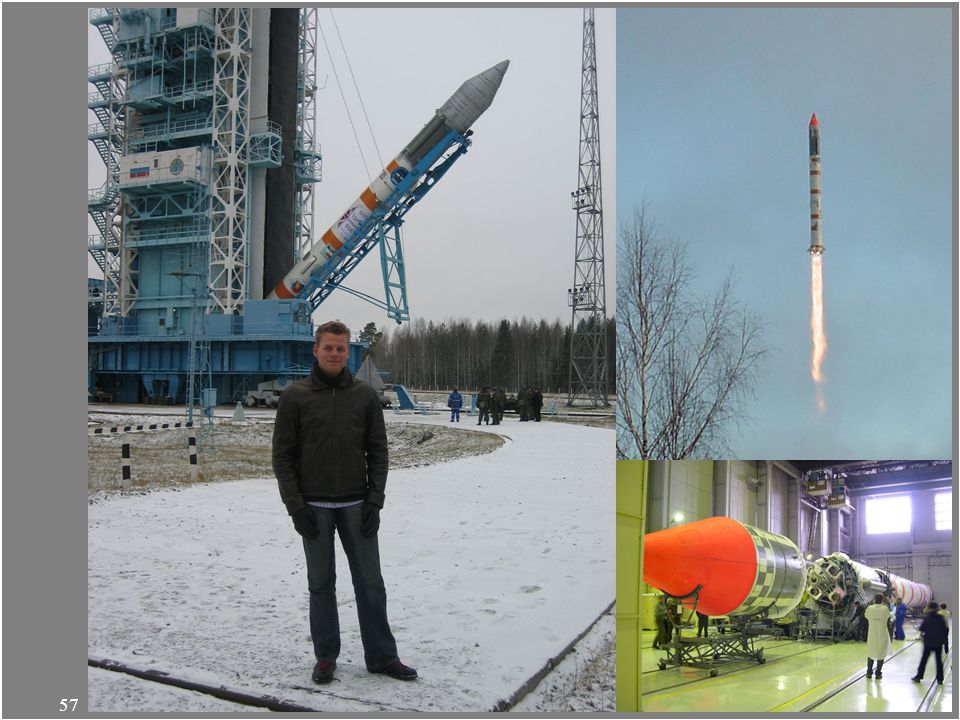
Og vores raket Kosmos 3M 33 meter høj 109 tons Første flight: 1964
Sted: Plesetsk Cosmodrome, Rusland

58
Hvordan kan man komme til arbejde med rumfart?
Fysik – Udvikling af måleinstrumenter, og ideer til eksperimenter. Elektronikingeniør – Udvikling af raketter, kontrolsystemer og kommunikations systemer. Maskiningeniør – Design af alle mekaniske komponenter i raket og satellit.

59
Adgangskrav Fysik Civilingeniør, Elektronik og Maskin
Matematik A-niveau og fysik B-niveau Civilingeniør, Elektronik og Maskin Matematik A, fysik B og kemi C samt enten mindst 8,0 i gennemsnit eller mindst 7,0 i gennemsnit (års- og eksamenskarakter) i hvert af fagene matematik A og fysik B
 i hvert af fagene matematik A og fysik B.")
Lignende præsentationer