Download præsentationen
Præsentation er lastning. Vent venligst

1
Signalbehandling og matematik 2 (Tidsdiskrete signaler og systemer)
Session 6. Lineære tidsinvariante systemer Ved Samuel Schmidt

2
Z-transformation Repetition z-transformation
Im 1 2 3 z z-transformation Hvor z er et komplekst tal F.eks. z=2+j3

3
Signaler og systemer i de 3 domæner
Repetition Signaler og systemer i de 3 domæner System Input Output Output Tids domænet: Fourier domænet: Z-transfomation:

4
System repræsentation i tidsdomænet
Repetition System repræsentation i tidsdomænet Impuls respons h[n]: F.eks. Input/output repræsentation Kan være en differentiel ligning

5
Nuller og Poler Nuller Poler ROC kan ikke indeholde polerne
Værdier af z som hvor X(z)=0 kaldes nuller Hvilket er rødderne til tæller polynomiet Poler Værdier af z som hvor X(z)= ∞ kaldes poler Hvilket er rødderne til nævner polynomiet ROC kan ikke indeholde polerne
=0 kaldes nuller. Hvilket er rødderne til tæller polynomiet. Poler. Værdier af z som hvor X(z)= ∞ kaldes poler. Hvilket er rødderne til nævner polynomiet. ROC kan ikke indeholde polerne.")
6
System repræsentation i z domænet
Repetition System repræsentation i z domænet z: Rationel form (ønsket form)
")
7
Z-transformation Eksempel
Kombination af to eksponentielle signaler Re Im 1 *1/2 *1/3

8
Z-transformation vs. Fourier
Fourier transformationen er en z-transformation hvor z skal tilhøre enheds cirklen. Amplitude og fase plots af Fourier transformationer er forklarende og intuitive Er findes en endelige z-transformation for flere signaler end for Fourier transformationen. Z-transformationen er analytisk fordelagtigt Poler og nuller kan fortolkes og derved beskrive systemet

9
Beregning af transformationer
Fourier transformation z-transformation Transformering Direkte beregning eller inspektion Invers transformering Hovedsageligt inspektion

10
Agenda Fourier vs Z-transformation
System funktioner for difference funktioner Inverse systemer Frekvens respons af LTI systemer Fekvens respons af rational system funktion

11
Z-transformation og Fourier transformation
Re Im 1 2 3 ω

12
Fourier på enhedscirklen
Re Im 1 2 3 Eulers formel: Fra geometrien ved vi Derfor er Derfor er Fourier transformationer en z transformation hvor z er begrænset til ω

13
Konvergens af Fourier transformationer
Fourier transformationen må repræsentere en endelig værdi for alle frekvenser Hvilket kræver at Fourier summen konvergere Derfor skal x[n] være absolut sumerbar Hvilket kun sker når x[n] enten er endelig eller går mod nul når

14
Konvergens af Fourier transformationen aflæst i z-planet
Fourier transformationen svare til en z-transformation med |z|=1 Derfor hvis ROC indeholder enhedscirklen konverger Fourier transformationen Re Im 1 2 3

15
Eksempel på FT konvergens
Højresiddet eksponentiel signal: Z-transformation: a=0.8 Kriterium for Fourier transformation konvergens opfyldes da Re Im 1 0.8

16
Eksempel på FT som ikke konvergere
Højresiddet eksponentiel signal: Z-transformation: a=1.2 Re Im 1 1.2

17
Foldning i frekvens domænet
Når: Foldning i tids domænet Multiplikation i frekvens domænet

18
Agenda Fourier vs Z-transformation
System funktioner for difference funktioner Inverse systemer Frekvens respons af LTI systemer Fekvens respons af rational system funktion

19
System funktioner for differentiel funktioner (1/3)
System repræsenteret ved differentiel funktion Z-transformation af differentiel funktion S.173

20
System funktioner for differentiel funktioner (2/3)
Omskrivning til rationel form

21
System funktioner for differentiel funktioner (3/3)
Faktoriseret udgave Hvor z=ck er nuller z=dk er poler

22
Eksempel (z-transfomation)
")
23
Eksempel (invers z-transformation til differentiel funktion)
")
24
Impuls respons af rationel systemer
Partial fraktion ekspansion Hvis M<N Hvis M≥N

25
Eksempel (invers z-transformation til impuls respons)
")
26
Brug af system funktion
Diskret tid-domæne Input output fremstilling Implus respons Z- domæne Diskret tid-domæne

27
Kausalitet system

28
Stabilt system Et stabilt system et system med en begrænset output interval såfremt inputtet er begrænset ”Bounded input Bounded output (BIBO)” I tids domænet: Vi kan se om ovenforstående gælder i z-transformatione hvis Derfor skal enhedscirkelen ligge i ROC hvis systemet er stabilt Dermed skal polerne for et stabilt system ligge indenfor enhedcirkelen
 I tids domænet: Vi kan se om ovenforstående gælder i z-transformatione hvis. Derfor skal enhedscirkelen ligge i ROC hvis systemet er stabilt. Dermed skal polerne for et stabilt system ligge indenfor enhedcirkelen.")
29
ROC af differentiel funktioner
Hvis systemet er kausalt Hvis systemet er stabilt Re Im 1 2 3 * * Im 3 2 1 Re * * 1 2 29

30
Annulering af nulpunkter og poler
Nulpunkter og poler af samme værdi ophæver hinanden Re Im 1 2 3 * *

31
IIR og FIR filter IIR FIR
Systemer med uendelige impuls respons har altid mindst en betydende pol (det vil sige ikke nul poler eller ophævede poler) FIR Systemer med endelige impuls respons har ingen betydende poler (det vil sige ikke nul poler eller ophævede poler) General form: Eksempel: Invers transformation:
 FIR. Systemer med endelige impuls respons har ingen betydende poler (det vil sige ikke nul poler eller ophævede poler) General form: Eksempel: Invers transformation:")
32
Eksempel: IIR system Z-transformation ved inspektion
Invers Z-transformation ved inspektion, givet at |z|>a Stabilt hvis a<1 men ikke endelig

33
Eksempel: FIR system Eksempel Z-transformation:
Ved hjælp af geometrisk rækker fås (se side 27 i bogen) Til differentiel ligning
 Til differentiel ligning.")
34
Agenda Fourier vs Z-transformation
System funktioner for difference funktioner Inverse systemer Frekvens respons af LTI systemer Frekvens respons af rational system funktion

35
Inverse systemer Et invers system Hi(z) er defineret som det system der udligner effekten af H(z) Eksempel:
 er defineret som det system der udligner effekten af H(z) Eksempel:")
36
Inverse systemer i tids og frekvens domænet
Tids domænet Frekvens domænet

37
Inverse systemer af rationelle definerede systemer
ROC: ROC af H(z) og Hi(z) systemer skal over lappe
 og Hi(z) systemer skal over lappe.")
38
Eksempel: inverse systemer
ROC |z|>0.9 Re Im 1 * + Re Im 1 + * ROC for H(z)Hi(z) Re Im 1
Hi(z) Re. Im. 1.")
39
Agenda Fourier vs Z-transformation
System funktioner for difference funktioner Inverse systemer Frekvens respons af LTI systemer Frekvens respons af rational system funktion Fra poler og nuller til frekvensrespons

40
Frekvens respons af LTI systemer
Outputtet er inputtet foldet med systemets impuls respons Foldning svare til multiplikation i frekvens domænet

41
Amplitude og fase respons
Amplitude output : Fase output : Hvor kaldes amplitude responsen eller ”gain” Hvor kaldes fase responsen eller fase skiftet

42
Eksempel på amplitude output

43
Eksempel på fase output

44
Amplitude og fase respons: Ideelle delay system
Frekvens respons Amplitude respons Fase respons

46
Fase forvrængning og forskydning
Typisk ønskes en fase forskydning på nul Ellers en lineær fase forskydning. S. 303

47
Group delay Forskydning opgivet i samples (tid) Idelle delay:
 Idelle delay:")
48
Ideelt gruppe delay I de fleste systemer vil vi gerne have konstant gruppe delay for interessante frekvenser Da forsager en lineær fase respons et konstant gruppe delay. S. 305

49
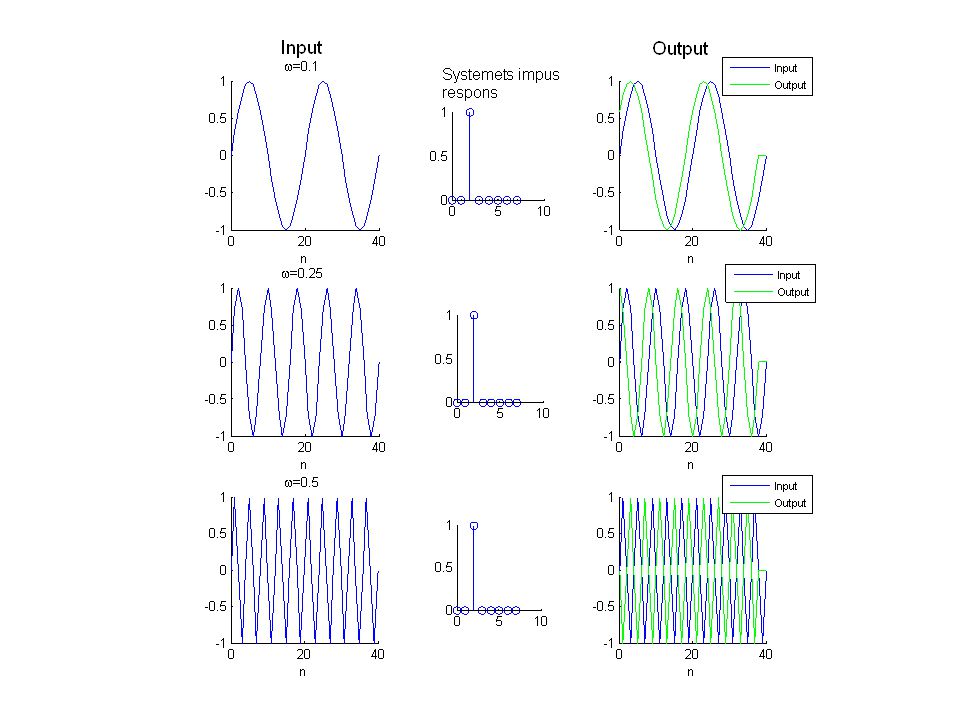
Eksempel: Systemet (1/3)
")
50
Eksempel: Inputet (2/3)
")
51
Eksempel: Outputtet (3/3)
")
52
Omskriv til Frekvens respons til polar form for illustration
Frekevns Amplitude: Fase skift: Real del (Amplitude) Kompleks del (Fase) s. 284
 Kompleks del. (Fase) s")
53
Beregning af fasen Direkte aflæst fra eksponentielle komplekse signaler Alternativ ”arc tan” funktionen som beregner den principielle fase Re Im 1 ω

54
Diskontinuer fase

55
Agenda Fourier vs Z-transformation
System funktioner for difference funktioner Inverse systemer Frekvens respons af LTI systemer Frekvens respons af rational system funktion

56
Frekvens respons af rationelle systemer
Ved at substituere z=ejω

57
Amplitude respons af rationelle systemer
multiplikation/division af absolutte faktorer

58
Fase respons af rationelle systemer
Gruppe delay: Addering/substrahering af absolutte faktorer

59
Amplitude respons i dB Amplitude respons i dB:
Der med kan både Amplitude og fase respons beregne ved addering

60
Tegning af amplitude og fase responser
Simpelt system Z-transformation: Substituer z=ejω Amplitude respons Fase respons

61
Tegning af amplitude respons (1/2)
Kvadratisk amplitude:

62
Tegning af amplitude respons (2/2)
")
63
Tegning af fase respons (1/2)
arctan løses med lommeregner eller Matlab

64
Tegning af fase respons (2/2)
")
65
Tegning af gruppe delay

66
Agenda Fourier vs Z-transformation
System funktioner for difference funktioner Inverse systemer Frekvens respons af LTI systemer Fekvens respons af rational system funktion

Lignende præsentationer







, der går gennem punkterne A(3, 2) og B(5, 1). Find f(1.5) og f(8).>")








>")
>")
>")
