Download præsentationen
Præsentation er lastning. Vent venligst

1
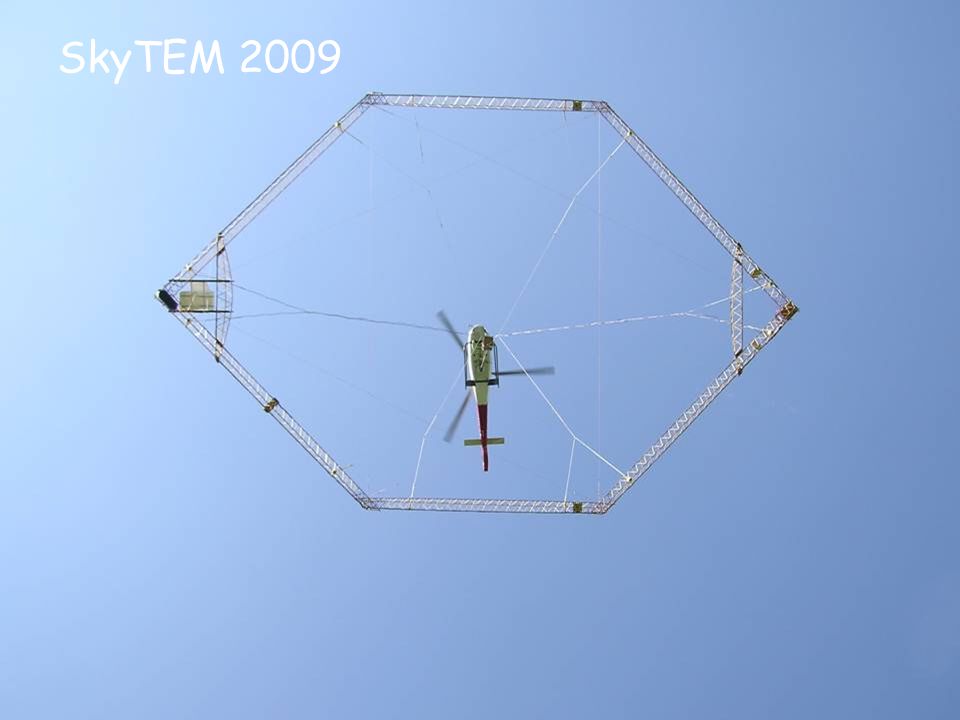
SkyTEM -nuværende muligheder -fremtidige udviklinger

2
Krav til og verifikation af SkyTEM udviklingen i 2002 SkyTEM system 2009 Udvalgte tekniske SkyTEM detaljer SkyTEM –fremtidige udviklinger Outline

3
I Primary field Current flow Basics physics of TEM How does it work? A stationary current flows in the transmitter loop -which sets up a primary magnetic field The current is shut off abruptly -which induces currents in the subsurface. This generates a secondary magnetic field -which is measured in the receiver coil at the surface Secondary field

4
Basic instrumentation of TEM

5
Krav til SkyTEM system ( -Danmark.2002 ) 1D lagdelte strukturer Should meet data quality of groundbased TEM methods Should reproduce ground based TEM results (refence site) No bias correction nor leveling of data sets Accurate geometrical parameters for inversion Rawdata (“coil data”) available Easy operation for “small” areas with fast mob/demob
 1D lagdelte strukturer Should meet data quality of groundbased TEM methods Should reproduce ground based TEM results (refence site) No bias correction nor leveling of data sets Accurate geometrical parameters for inversion Rawdata ( coil data ) available Easy operation for small areas with fast mob/demob")
6
1D lagdelte strukturer Samme eller bedre datakvalitet som jordbaserede TEM data Should reproduce ground based TEM results (refence site) No bias correction nor leveling of data sets Accurate geometrical parameters for inversion Rawdata (“coil data”) available Easy operation for “small” areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)
 No bias correction nor leveling of data sets Accurate geometrical parameters for inversion Rawdata ( coil data ) available Easy operation for small areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)")
7
1D lagdelte strukturer Samme eller bedre datakvalitet som jordbaserede TEM data Reproducere jordbaserede TEM data (reference lokalitet) No bias correction nor leveling of data sets Accurate geometrical parameters for inversion Rawdata (“coil data”) available Easy operation for “small” areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)
 No bias correction nor leveling of data sets Accurate geometrical parameters for inversion Rawdata ( coil data ) available Easy operation for small areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)")
8
1D lagdelte strukturer Samme eller bedre datakvalitet som jordbaserede TEM data Reproducere jordbaserede TEM data (reference lokalitet) Ingen bias eller drift korrektion af data Accurate geometrical parameters for inversion Rawdata (“coil data”) available Easy operation for “small” areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)
 Ingen bias eller drift korrektion af data Accurate geometrical parameters for inversion Rawdata ( coil data ) available Easy operation for small areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)")
9
1D lagdelte strukturer Samme eller bedre datakvalitet som jordbaserede TEM data Reproducere jordbaserede TEM data (reference lokalitet) Ingen bias eller drift korrektion af data Nøjagtige geometriske parametre og system respons til inversionen Rawdata (“coil data”) available Easy operation for “small” areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)
 Ingen bias eller drift korrektion af data Nøjagtige geometriske parametre og system respons til inversionen Rawdata ( coil data ) available Easy operation for small areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)")
10
1D lagdelte strukturer Samme eller bedre datakvalitet som jordbaserede TEM data Reproducere jordbaserede TEM data (reference lokalitet) Ingen bias eller drift korrektion af data Nøjagtige geometriske parametre og system respons til inversionen Rådata til rådighed for kvalitetskontrol Easy operation for “small” areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)
 Ingen bias eller drift korrektion af data Nøjagtige geometriske parametre og system respons til inversionen Rådata til rådighed for kvalitetskontrol Easy operation for small areas with fast mob/demob Krav til SkyTEM system (-Danmark.2002)")
11
1D lagdelte strukturer Samme eller bedre datakvalitet som jordbaserede TEM data Reproducere jordbaserede TEM data (reference lokalitet) Ingen bias eller drift korrektion af data Nøjagtige geometriske parametre og system respons til inversionen Rådata til rådighed for kvalitetskontrol Operation mulig for “små” arealer med hurtig mob/demob Krav til SkyTEM system (-Danmark.2002)
 Ingen bias eller drift korrektion af data Nøjagtige geometriske parametre og system respons til inversionen Rådata til rådighed for kvalitetskontrol Operation mulig for små arealer med hurtig mob/demob Krav til SkyTEM system (-Danmark.2002)")
12
Senderen SkyTEM December 2002

13
Verifikation af SkyTEM system reference målinger med ProTEM47 i en 40x40m Central loop reference model fra inversion af reference målinger udregne “SkyTEM reference målinger” i operationshøjder reproducere “SkyTEM reference målinger” med SkyTEM system i operationshøjder checke bias i stor højde

14
reference measurements with ProTEM47 in a 40x40m Central loop reference model from inversion of reference measurements calculate “SkyTEM reference measurements” for operation altitudes reproducere “SkyTEM reference målinger” med SkyTEM system i operationshøjder documentation of no significant bias signal at high altitudes Verifikation af SkyTEM system

15
SkyTEM Altitude 10 m Reference data set (calculated) Verification of SkyTEM 2002 Low Tx signal (5.000 Am 2, 6 s) High Tx signal (30.000 Am 2, 80 s)
 Verification of SkyTEM 2002 Low Tx signal (5.000 Am 2, 6 s) High Tx signal ( Am 2, 80 s)")
16
SkyTEM Altitude 10 m R: Measured data set B: Reference data set Error bars: B: 2% R: 3% Verification of SkyTEM 2002

17
SkyTEM Altitude 20 m Reference data set (calculated) Verification of SkyTEM 2002
 Verification of SkyTEM 2002")
18
SkyTEM Altitude 20 m R: Measured data set B: Reference data set Error bars: B: 2% R: 3% Verification of SkyTEM 2002

19
SkyTEM Altitude 30 m Reference data set (calculated) Verification of SkyTEM 2002
 Verification of SkyTEM 2002")
20
SkyTEM Altitude 30 m R: Measured data set B: Reference data set Error bars: B: 2% R: 3% Verification of SkyTEM 2002

21
reference measurements with ProTEM47 in a 40x40m Central loop reference model from inversion of reference measurements calculate “SkyTEM reference measurements” for operation altitudes reproduce reference measurements with SkyTEM instrumentation in a 40x40m Central loop on ground checke bias i stor højde Verifikation af SkyTEM system

22
Data fra stor højde skal indikere ubetydelige lækage strømme ubetydelig Tx – Rx interaktion ubetydelig induktion af hvirvelstrømme i helikopter Verifikation af SkyTEM system

23
Time [s] 1e-051e-041e-03 dB/dt [V/(m^2*s)] 1e-10 1e-09 1e-08 1e-07 1e-06 1e-05 1e-04 SITEM Version: 1.2.4.55 Date: 18-02-2004 Time: 15:23:15 SkyTEM Bias measurements High Altitude 600 m Noise signal 600 m Verification of SkyTEM 2002
![Time [s] 1e-051e-041e-03 dB/dt [V/(m^2*s)] 1e-10 1e-09 1e-08 1e-07 1e-06 1e-05 1e-04 SITEM Version: Date: Time: 15:23:15 SkyTEM Bias measurements High Altitude 600 m Noise signal 600 m Verification of SkyTEM 2002](http://images.slideplayer.dk/8/2295443/slides/slide_23.jpg "Time [s] 1e-051e-041e-03 dB/dt [V/(m^2*s)] 1e-10 1e-09 1e-08 1e-07 1e-06 1e-05 1e-04 SITEM Version: Date: Time: 15:23:15 SkyTEM Bias measurements High Altitude 600 m Noise signal 600 m Verification of SkyTEM 2002")
24
Decay signal 600 m Noise signal 600 m SkyTEM Bias measurements High Altitude 600 m High Tx moment only Verification of SkyTEM 2002 No measurements of decay signal

25
l Noise - heigh altitude l Blue – data heigh altitude l Red – data production altitude Time [s] 1e-051e-041e-03 dB/dt [V/(m^2*s)] 1e-10 1e-09 1e-08 1e-07 1e-06 1e-05 1e-04 SITEM Version: 1.2.4.55 Date: 18-02-2004 Time: 15:32:43 Decay signal operating altitude Decay signal 600 m Noise signal 600 m SkyTEM Bias measurements High Altitude 600 m High Tx Moment only No measurements of decay signal Verification of SkyTEM 2002
![l Noise - heigh altitude l Blue – data heigh altitude l Red – data production altitude Time [s] 1e-051e-041e-03 dB/dt [V/(m^2*s)] 1e-10 1e-09 1e-08 1e-07 1e-06 1e-05 1e-04 SITEM Version: Date: Time: 15:32:43 Decay signal operating altitude Decay signal 600 m Noise signal 600 m SkyTEM Bias measurements High Altitude 600 m High Tx Moment only No measurements of decay signal Verification of SkyTEM 2002](http://images.slideplayer.dk/8/2295443/slides/slide_25.jpg "l Noise - heigh altitude l Blue – data heigh altitude l Red – data production altitude Time [s] 1e-051e-041e-03 dB/dt [V/(m^2*s)] 1e-10 1e-09 1e-08 1e-07 1e-06 1e-05 1e-04 SITEM Version: Date: Time: 15:32:43 Decay signal operating altitude Decay signal 600 m Noise signal 600 m SkyTEM Bias measurements High Altitude 600 m High Tx Moment only No measurements of decay signal Verification of SkyTEM 2002")
26
SkyTEM 2004 - 2008

27
Tx, Cooler & Control GPS & Radio Altimeter Altimiter Rx Coils Z & X Rx Generator 16 meters 28 meters Tx Coils SkyTEM 2009 Inclinometers

28
SkyTEM 2009 l Time gates: ~ 10 s - til 10 (20) ms l Ingen bias eller drift korrektion l Systemrespons fuldt beskrevet l Reproducerer reference data indenfor 5% l Repeterer testsite data bedre end 3% l Stiv bærekonstruktion Stabile geometriske parametre
 ms l Ingen bias eller drift korrektion l Systemrespons fuldt beskrevet l Reproducerer reference data indenfor 5% l Repeterer testsite data bedre end 3% l Stiv bærekonstruktion Stabile geometriske parametre")
29
l Two-moment system l Lavt moment –overfladenær opløsning 2.000 -10.000 Am2 TurnOff ~ 2 - 6 µs l Højt moment –dybde opløsning 150 -200.000 Am2 TurnOff ~ 40 - 60 µs l Operationshøjde og -hastighed ~ 20 - 35 meter ~ 20 - 90 km/tim l Geometrical parametre målt Højde, rammevinkler og DPGS l ”Stand Alone” (ingen operator i helikopter) l Vægt: 350 - 380 kg SkyTEM 2009
 l Vægt: kg SkyTEM 2009")
30
SkyTEM i dag Areal: 300 – 500 m2 Sender Vinkelmåler Højdemåler Modtagerspole Modtager- & StyreElektronik Generator Radiosender 16 meter 28 meter 18:00 SkyTEM 2009

32
SkyTEM i dag Areal: 300 – 500 m2 Sender Vinkelmåler Højdemåler Modtagerspole Modtager- & StyreElektronik Generator Radiosender 16 meter 28 meter 18:00 Ups.. Was the tree 40 meters high?

33
SkyTEM tekniske detaljer Multi sender spoler Geometrisk reduktion af bias Reduceret harmonisk forvrængning Analog gating styret digitalt

34
Tx Sender Modtager Sender Spole(r) Rx Spole Reference Rx Senderen
 Rx Spole Reference Rx Senderen")
35
V t 40 kV ”R/L forløb” [e -R/L*t ] R G L V Senderen
![V t 40 kV R/L forløb [e -R/L*t ] R G L V Senderen](http://images.slideplayer.dk/8/2295443/slides/slide_35.jpg "V t 40 kV R/L forløb [e -R/L*t ] R G L V Senderen")
36
R G L V t 1200 V R/L forløb Avalanche forløb [ dI/dt = - V/L ] V Senderen
![R G L V t 1200 V R/L forløb Avalanche forløb [ dI/dt = - V/L ] V Senderen](http://images.slideplayer.dk/8/2295443/slides/slide_36.jpg "R G L V t 1200 V R/L forløb Avalanche forløb [ dI/dt = - V/L ] V Senderen")
37
V t R/L forløb Avalanche forløb Frontgate Instrument Primært respons Jord respons måling starter Jord response Rx Tx Senderen og målingen

38
Magnetisk Moment = areal x vindinger x strøm Selvinduktion prop. Med: oLængde oVindinger 2 TurnOff tid (Avalanche + R/L) prop. med: o( Selvinduktion) / (TurnOff spænding) oStrøm oTidskonstant = (Selvinduktion)/ (dæmp. Mod.) 0 Volt 1200 Volt 12 Volt TurnOff Spænding Driv-spænding 0 Ampere 100 Ampere 10 milli sek. 30 mikro sek. Strøm TurnOff tid TurnOn tid TurnOn tid prop. Med: o( Selvinduktion) / (modstand) o1 / Driv-spænding Sender parametre
 prop. med: o( Selvinduktion) / (TurnOff spænding) oStrøm oTidskonstant = (Selvinduktion)/ (dæmp. Mod.) 0 Volt 1200 Volt 12 Volt TurnOff Spænding Driv-spænding 0 Ampere 100 Ampere 10 milli sek. 30 mikro sek. Strøm TurnOff tid TurnOn tid TurnOn tid prop. Med: o( Selvinduktion) / (modstand) o1 / Driv-spænding Sender parametre.")
39
R/L forløb LM Lavt Moment, LM (1 v, 150 uH)) Højt Moment, HM (4 v, 1600 uH) R/L forløb HM Avalanche forløb LM Avalanche forløb HM Højt- og lavt moment sammen V t
) Højt Moment, HM (4 v, 1600 uH) R/L forløb HM Avalanche forløb LM Avalanche forløb HM Højt- og lavt moment sammen V t")
40
R/L forløb LM ukoblet Lavt Moment, LM (1 v, 150 uH)) Højt Moment, HM (4 v, 1600 uH) Frontgate R/L forløb LM koblet Avalanche forløb LM Kobling V t Højt- og lavt moment sammen
) Højt Moment, HM (4 v, 1600 uH) Frontgate R/L forløb LM koblet Avalanche forløb LM Kobling V t Højt- og lavt moment sammen")
41
V t Lavt Moment, LM (1 v, 150 uH)) Højt Moment, HM (4 v, 1600 uH) Frontgate R/L forløb LM koblet Avalanche forløb LM Kobling Jord response Højt- og lavt moment sammen
) Højt Moment, HM (4 v, 1600 uH) Frontgate R/L forløb LM koblet Avalanche forløb LM Kobling Jord response Højt- og lavt moment sammen")
42
LM Tx Coil HM Tx Coil Coupling!! LM V t HM Gate center tider fra 10 s til 20 – 30 ms

43
Tx Sender Modtager Sender spole Rx Spole Reference Rx Modtageren

44
Frontgate sample Integration of signal Gatewidth log V log t Rx Integrator Sampler Instrument (Rx) Frontgate Digital Control Problems to encounter___________ dB/dt provides 10 7 dynamic ranges Analog integrated gates provides less than 10 4 dynanic range Gating 10 7 10 4
 Frontgate Digital Control Problems to encounter___________ dB/dt provides 10 7 dynamic ranges Analog integrated gates provides less than 10 4 dynanic range Gating")
45
0 - position Reduktion af primært respons og lækage respons TX spole Modtagerspole Ingen bias korrection

46
SkyTEM Ingen bias korrection Super Lavt Moment (SLM) Signal i produktionshøjde Bias begravet i støjen (stor højde)
 Signal i produktionshøjde Bias begravet i støjen (stor højde)")
47
Rx Integrator Sampler Instrument (Rx) Frontgate log V log t Digital Control t -2.5 t -1 harmonic distortion earth response primary response 120 dB Frontgate
 Frontgate log V log t Digital Control t -2.5 t -1 harmonic distortion earth response primary response 120 dB Frontgate")
48
log V log t t -1 harmonic distortion earth response primary response Rx Integrator Sampler Instrument (Rx) Frontgate Digital Control t -2.5 120 dB Frontgate
 Frontgate Digital Control t dB Frontgate")
49
Reference signal Efter instrument kalibrering: Resterende effekter af: Synkronisering Tx TurnOff Frontgate korrigeres med tidsforskydning til at matche reference respons FrontGate Synkronisering etc.

50
Modtager spole Rx Forstærkere Integratorer Rhoa (Ohmm) Båndpas filtering Støjreduktion: mindre båndbredde > større forvrængning
 Båndpas filtering Støjreduktion: mindre båndbredde > større forvrængning")
51
Hæve højt moment (400.000 Am 2, dybere indtrængning) SkyTEM fremtid
 SkyTEM fremtid")
52
Hæve højt moment (400.000 Am 2, dybere indtrængning) Multi moment uden ”huller” i data SkyTEM future
 Multi moment uden huller i data SkyTEM future")
53
Hæve højt moment (400.000 Am 2, dybere indtrængning) Multi moment uden ”huller” i data Forbedre S/N forhold i modtagerspolesystem SkyTEM future
 Multi moment uden huller i data Forbedre S/N forhold i modtagerspolesystem SkyTEM future")
54
Hæve højt moment (400.000 Am 2, dybere indtrængning) Multi moment uden ”huller” i data Forbedre S/N forhold i modtagerspolesystem Endnu tidligere tider (6 til 8 s!) ved ”on the fly” korrektion af bias (ups..) SkyTEM future
 Multi moment uden huller i data Forbedre S/N forhold i modtagerspolesystem Endnu tidligere tider (6 til 8 s!) ved on the fly korrektion af bias (ups..) SkyTEM future")
55
Hæve højt moment (400.000 Am 2, dybere indtrængning) Multi moment uden ”huller” i data Forbedre S/N forhold i modtagerspolesystem Endnu tidligere tider (6 til 8 s!) ved ”on the fly” korrektion af bias (ups..) Højere operationshastighed (120 til 130 km/tim) SkyTEM future
 Multi moment uden huller i data Forbedre S/N forhold i modtagerspolesystem Endnu tidligere tider (6 til 8 s!) ved on the fly korrektion af bias (ups..) Højere operationshastighed (120 til 130 km/tim) SkyTEM future")
56
end

Lignende præsentationer
















>")


