Download præsentationen
Præsentation er lastning. Vent venligst

1
CORBA/e CORBA and Embedded Systems OOMI 27. November 2006

2
But SW Promised…! CORBA/e er embedded og Real Time CORBA standarden der erstatter Minimal CORBA og Real Time CORBA standarderne. Med lidt held vil vi præsentere to ORBer der kører på VxWorks platformen (og måske endda på vores SBCer), så I selv kan anvende dette. Indhold: - CORBA/e ( Mimimal CORBA + RT CORBA) oversigt - CORBA/e - forskelle og lighededer med den 'almindelige' CORBA standard - Interoperability med andre CORBA klienter - PrismTechs OpenFusion e*ORB C++ (VxWorks, andre RTOS) - PrismTechs Opfensuion e*ORB C (til microcontroller og DSP baserede systemr) - Real Time TAO ORB på VxWorks platformen "
, så I selv kan anvende dette. Indhold: - CORBA/e ( Mimimal CORBA + RT CORBA) oversigt - CORBA/e - forskelle og lighededer med den almindelige CORBA standard - Interoperability med andre CORBA klienter - PrismTechs OpenFusion e*ORB C++ (VxWorks, andre RTOS) - PrismTechs Opfensuion e*ORB C (til microcontroller og DSP baserede systemr) - Real Time TAO ORB på VxWorks platformen .")
3
Essentials to Embedded Systems Constraints: –Little CPU power and available bits (8,16,32..). –Small Memory (16 KB,64KB, 256 KBRAM..) –Tailored Operative Systems or even absence of an OS ->Firmware instead –Real Time Another platform then your development system. Heterogeneous development tools
 –Tailored Operative Systems or even absence of an OS ->Firmware instead –Real Time Another platform then your development system. Heterogeneous development tools.")
4
Focus: Architecture. Embedded systems runs in more and more heterogeneous environments. Gives the need of specifying an architecture for communication between the systems (embedded, PC’ or what ever) Another “burden” to embedded system and application developers CORBA/e may be seen as a “help” to above points. Spec. published 2006-08-03
 Another burden to embedded system and application developers CORBA/e may be seen as a help to above points. Spec. published")
5
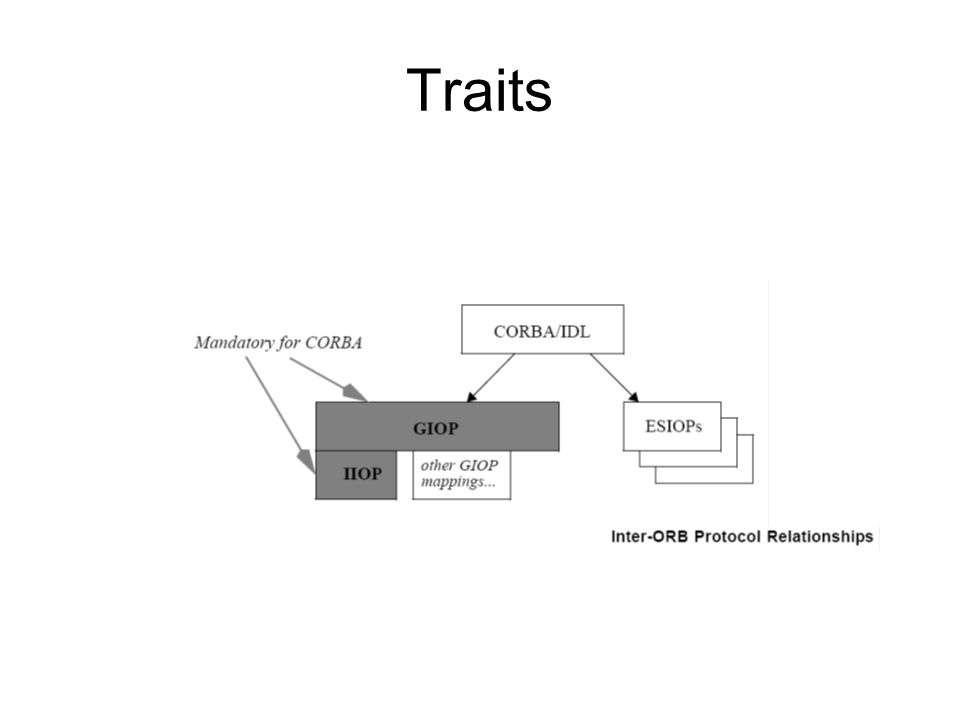
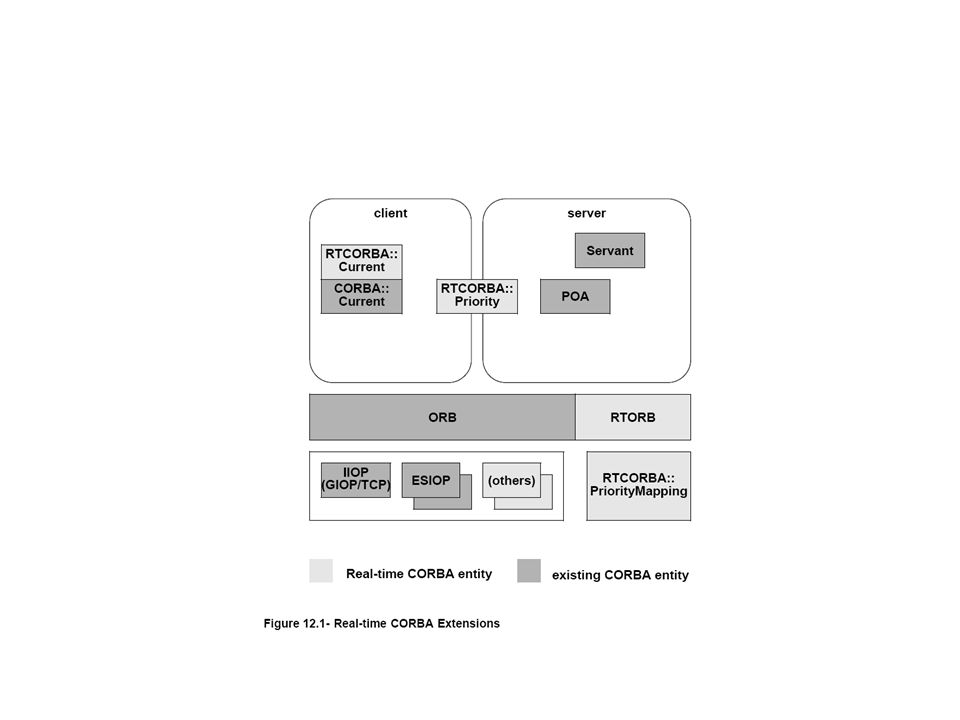
Traits

6
TRAITS

7
Traits

9
Embedded adoption Profiles (A collection of components) CORBA/e Compact Profile For 32 BIT RTOS CORBA/e Micro Profile (Minimal) For small systems like Digital Signal Processors
 CORBA/e Compact Profile For 32 BIT RTOS CORBA/e Micro Profile (Minimal) For small systems like Digital Signal Processors")
10
Design and Corba/e Layers for design No Write Once Run anywhere! Corba Application Corba/e Posix Standard RTOS Another RTOS Embedded OS/ Fitmware Board of different types

11
Architectural and Design Concerns What are the needs of the “Use Case”? Communications between systems/nodes Predictable scheduling (Also called Real Time) How do the nodes interact? Asynchronous or synchronous Do they have scheduling constraints across communication lines Who controls scheduling Can control be “handed over” from one node to another (Distributed control)
 How do the nodes interact. Asynchronous or synchronous Do they have scheduling constraints across communication lines Who controls scheduling Can control be handed over from one node to another (Distributed control).")
12
What’s missing?

13
What’s In?

14
What’s In? Corba/e compact

15
What’s In?

16
What’s In? Corba/e micro

18
Inspiration from TAO

Lignende præsentationer














, brug >Forøg listeniveau- knappen i Topmenuen For at få.>")
>")



>")